Tuning ANY AI agent with Tinker X Agent-lightning
Yuge Zhang
Nov. 2025
Tinker is the first product built by an all-star company called Thinking Machine Lab, whose team members come from leading organizations such as OpenAI. Notable members include former OpenAI CTO Mira Murati; John Schulman, the first author of PPO; Barret Zoph, a leading scientist in AutoML (the area I previously worked in); and well-known Asian researchers like Danqi Chen and Lilian Weng.
![]() The TinkerToy Computer, invented by Daniel Hillis and Brian Silverman, was a mechanical computer made from 10,000 Tinkertoys that could play tic-tac-toe.
The TinkerToy Computer, invented by Daniel Hillis and Brian Silverman, was a mechanical computer made from 10,000 Tinkertoys that could play tic-tac-toe.
Tinker is a star product from this all-star company, which describes itself as a “flexible API for fine-tuning language models” — supporting supervised fine-tuning (SFT), reinforcement learning (RL), and even low-level primitives such as forward\_backward and sample. These primitives allow users to express and customize nearly any training method imaginable, from conventional supervised tasks to advanced RL algorithms.
I am a member of the Agent-lightning team. In essence, Agent-lightning is a framework that: (1) Distributes rollouts to external runners. (2) Traces executions (written in frameworks like LangChain, Google ADK, or OpenAI Agents) using observability frameworks such as AgentOps to collect telemetry. (3) Converts the telemetry into structured datasets consumable by RL or SFT pipelines.
Discovering Tinker
I first encountered Tinker during the October National Day vacation — right in the middle of refactoring for Agent-lightning v0.2.0. When I first saw its API, my immediate reaction was: “Gosh, that’s exactly what we’ve been looking for.” At the time, we were struggling with VERL’s rigid design. Since day one, VERL was conceived as an end-to-end interface. Integrating external rollouts required hacking into its internal trainer logic — and those hacks would often break with each new update.
We also discovered that reliable RL training required telemetry with token IDs. However, because the vLLM endpoint was tightly coupled with VERL, we had to collaborate with both the vLLM team and the VERL team to propagate token IDs correctly into the telemetry.
This process was painful and brittle. It led to internal debates: should we drop VERL altogether and manage vLLM ourselves — or even build a custom trainer based on TRL or other frameworks? Unfortunately, nearly every trainer that supports live data collection tightly embeds that logic within its codebase, making customization difficult.
When I finally studied Tinker, it was a revelation. It offered exactly what we’d been missing — a clean separation between training and sampling, a flexible training loop, and token-level control. My goal became clear: to see whether Tinker could serve as a backend substitute for VERL, while keeping the rest of Agent-lightning unchanged.
How Tinker Works
Tinker is structured into two main components: (1) Tinker (core) — the low-level framework for model training and sampling. (2) Tinker Cookbook — a set of ready-to-use recipes and examples. For newcomers, I highly recommend reading this official article, which clearly explains Tinker’s foundational ideas.
Conceptually, Tinker introduces two cooperating clients:
- Training Client – performs forward and backward passes, updates weights, and saves checkpoints.
- Sampling Client – loads a checkpointed model and generates new data for further training.
This allows iterative fine-tuning by (1) Sample data using the current mode with sampling client. (2) Train on that data with training client. (3) Save a new checkpoint. (4) Repeat. Multiple checkpoints can even coexist, enabling parallel model versions — something traditional fine-tuning platforms struggle with.
Compared with Azure OpenAI Fine-tuning, Tinker is dramatically faster: Training runs in seconds (instead of hours). Deployment takes ~15 seconds (versus several minutes). Moreover, the key advantage is that Tinker’s APIs expose forward and backward passes separately, giving researchers full control over the training loop. You don’t handle distributed infrastructure — Tinker abstracts that — but you can still innovate at the algorithmic level (e.g., custom losses or RL reward shaping).
No GPU cluster management, no container setup — Tinker handles the heavy lifting. You focus purely on the logic.
The Tinker team documents this process thoroughly in their introduction on loss functions. Here’s a conceptual diagram illustrating its workflow:
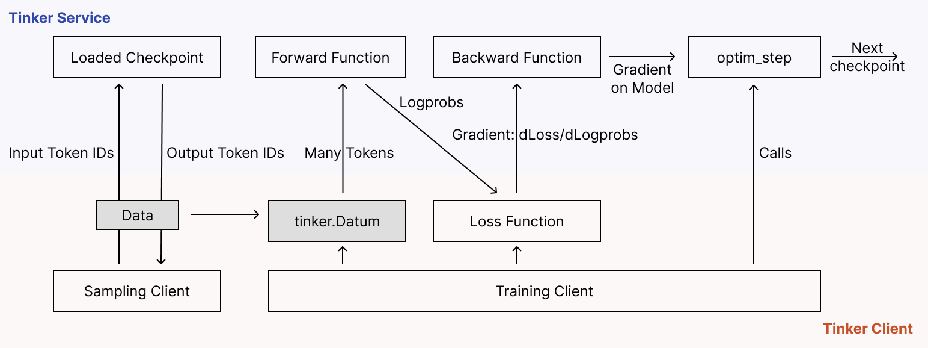 Illustrating how Tinker works conceptually.
Illustrating how Tinker works conceptually.
Tinker’s engineers have optimized these primitives so effectively that training feels instantaneous — a huge productivity boost, especially for RL researchers used to slow feedback loops.
Wait… Env?
I signed up for the Tinker waitlist on the first day and got access on October 17th, thanks in part to my girlfriend, who had a friend working there. I was eager to see what I could build with this rising platform. Meanwhile, I continued refining Agent-lightning’s new interface and dealing with various issues in VERL, vLLM, and LiteLLM — experiences that later proved invaluable for Tinker integration.
 The Welcome Letter from Tinker.
The Welcome Letter from Tinker.
I was delayed by personal matters after receiving that email, so it wasn’t until October 20th that I began testing Tinker. However, I encountered login issues, which later turned out to be caused by an AWS outage. Not realizing that at the time, I assumed Tinker wasn’t production-ready and put it aside for later. I finally resumed work on October 22nd.
After some initial experiments using Tinker’s sample projects, I chose the RL example from the Tinker Cookbook as a starting point. Upon investigation, I found that several modifications were needed to make it compatible with Agent-lightning. The key difference was how Agent-lightning and Tinker’s RL example handle the concept of an “environment.”
In Tinker’s examples, there’s no dedicated tracer or telemetry system (except for logging training progress). To collect the token IDs required for training, they implement rollouts as follows:
| |
This ensures that the returned Trajectory object contains all necessary data for training. Because the data protocol is token-based, the policy must be a stateless token-in/token-out LLM. To adapt this to new scenarios, users must implement an Env class:
| |
This design resembles traditional reinforcement learning setups like gym.Env and EnvWrappers.
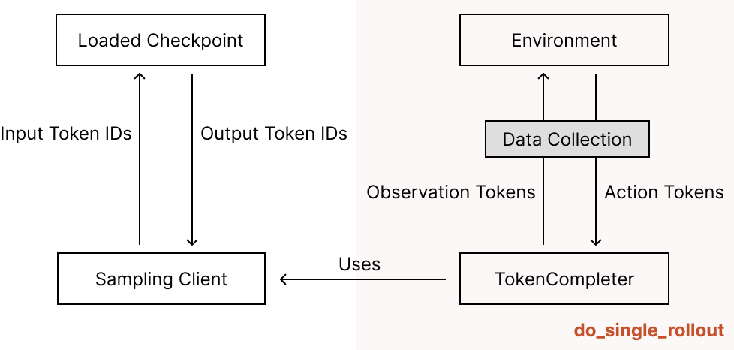 Tinker’s Env
Tinker’s Env
While this isn’t a bad design, it’s cumbersome to build modern agents this way. Trying to extract and adapt LLM calls from large projects like Codex, Claude Code, or RD-Agent into Env-compatible structures would be extremely difficult.
For example, consider a simple “guess-the-number” agent — also an official Tinker example. Using a regular chat-completion API, the code looks straightforward:
| |
This could be even simpler with frameworks like LangChain. But rewriting this into an explicit Env-based interface is much more complicated, requiring conversion between messages and tokens, and careful turn management:
| |
I wouldn’t recommend programming new agents in this way, unless you have already had a code written in Env-style.
Integrating Agent-lightning into Tinker
Agent-lightning is a keen supporter that you should write the agent in the way that feels most natural to agent developers and the framework should take care of the rest. You might naturally wonder how to collect token IDs for training when agents are written in the former (chat-based) style. This is where Agent-lightning becomes useful.
Agent-lightning leverages observability frameworks like AgentOps, which trace agents by instrumenting APIs such as openai.chat.completion or agent.run, logging inputs and outputs to third-party services. While these logs are usually used for “LLMOps” — i.e., monitoring and debugging AI applications — Agent-lightning uses them for training data collection. Refer to the documentation and other examples of Agent-lightning for details.
When integrating Agent-lightning into the Tinker example, because embedding a dedicated Env into an agent would be intrusive, I bypass it entirely by introducing a dummy environment:
| |
I then implement agl_single\_rollout to replace Tinker’s do_single\_rollout. This version delegates tasks to a queue, letting the Agent-lightning runner execute them with tracing enabled. To remain compatible with Tinker’s structure, it waits for rollout completion and converts the collected data into a Trajectory.
| |
You might notice that agl_single\_rollout uses llm_resources\_id instead of Tinker’s original policy token completer. This is because agent implementations based on openai.OpenAI() require an OpenAI-compatible API, not a token-level sampling client. This led to the creation of an OpenAI-compatible wrapper for the sampling client, implemented using LiteLLM’s CustomLLM interface:
| |
This implementation converts messages to tokenized model input via Tinker’s renderer, calls the sampling client, and then decodes the tokens back into responses. Although Tinker’s renderer is still in an early stage with limited coverage and stability, it’s sufficient for basic use cases — and I expect it to mature rapidly.
The TinkerLLM class can now function as a Custom LLM in LiteLLM. Since Agent-lightning already includes an LLM proxy built on LiteLLM, I plugged this LLM directly into it and registered its address as an LLM resource (the resource\_id mentioned earlier). Afterward, the rollout runners communicate with the LLM proxy using prompts and responses (rather than token IDs), while token IDs are collected both from the proxy and the tracer — all handled within Agent-lightning.
This integration allows Agent-lightning to treat Tinker as a backend fine-tuning engine while maintaining its existing data collection and rollout mechanisms. The architecture evolves into the following augmented design:
 The architecture of the integration of Agent-lightning and Tinker
The architecture of the integration of Agent-lightning and Tinker
A Hello-world Trial
I chose my first example to satisfy three constraints: (1) it should be easy to implement, (2) it shouldn’t depend on a large dataset, and (3) it should let me quickly verify whether my implementation is correct. I also thought it would be fun to tease Qwen a little and make it claim to be something other than Qwen. We all know Qwen is carefully tuned to recognize itself as “Qwen,” so this kind of role-play is somewhat counter-instinctive and would have to be learned during training.
I ended up writing an agent like this:
| |
This agent has three simple stages:
- it calls a chat completion targeting the LLM behind our LLM proxy,
- it checks the response and assigns a reward of 1, -1, or 0, and
- it emits that reward to the Agent-lightning store via
emit\_reward.
I then trained this agent using Agent-lightning’s Tinker algorithm (which I had just finished building). A bit of extra context on batch size and group size (not central to the article, but useful): the Tinker Cookbook’s RL example implements a GRPO-like strategy. Each task (their Env) is replicated group\_size times, producing group\_size trajectories. In each batch we therefore collect group\_size × batch\_size trajectories.
Each trajectory looks like prompt1, response1, reward1, …, promptN, responseN, rewardN. The rewards within a trajectory are summed to form a trajectory sum-reward and then normalized by the group’s average sum-reward to produce an advantage. That advantage is copied to each response — and then to each token in that response. In other words, all tokens generated within a trajectory receive the same advantage. It’s a simple and effective approach, and it’s very similar to what the Agent-lightning team proposed in our preprint.
| |
During training, I greet Qwen with prompts from “Let’s play a game. Say you are 0.” up to “…999.”, expecting replies like “Hi! I’m 0.” or “Hi! I’m 999.”. For testing, I repeat the same procedure for 1000–1023. I run 8 rollout runners in parallel to handle all interactions.
It took about three hours to complete one epoch over the training set. The model began fairly rebellious but improved steadily — eventually becoming almost perfect. So yes: it works!
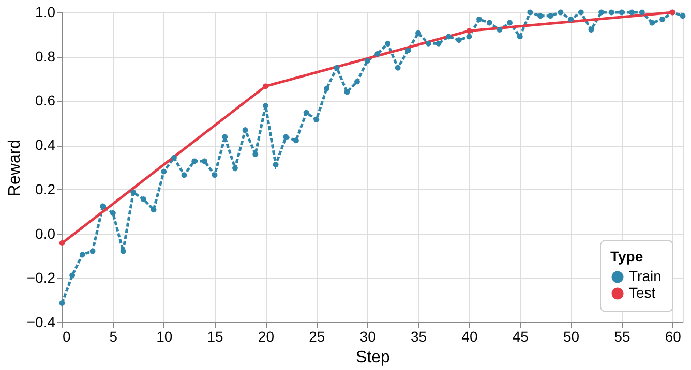 Learning curve for the Hello-world example
Learning curve for the Hello-world example
The Tinker’s original code also prints out some examples so that we can see how the model behaves before the training and after.
Before the training, the model responds like this:
| |
After the training, it becomes:
| |
The code for this example can be found here.
20 Questions Game
The game of 20 Questions is simple but surprisingly deep. One player secretly thinks of something, and the other has up to twenty yes-or-no questions to figure out what it is. When I decided to reproduce this classic reasoning game using CrewAI, I wasn’t just trying to build something fun. I wanted to explore how modern agent frameworks handle structured, multi-step reasoning between two language models — and see how far we could get with a system that feels both logical and conversational.
I chose this task as my second experiment partly because I’d seen an earlier version of the game in the Tinker Cookbook built using the Env interface. It felt like the perfect benchmark for testing a more recent framework. Around the same time, I’d also been working with Microsoft’s Agent Framework team, where we trained an agent on Tau2-bench. That experiment inspired me to try something similar using a different toolset — one that others could easily replicate.
Among all the agent frameworks, CrewAI caught my attention. It was listed as supported on Agent-Lightning’s index page but didn’t yet have examples to follow. I wasn’t particularly attached to it, but it was being talked about a lot, and I wanted to see what the hype was about. It ended up taking roughly a day to build the first version of the agent, and another two or three days to refine it until it behaved intelligently even with smaller public models like gpt-5-mini.
CrewAI: Flow, Agent, and Tools
At the heart of CrewAI lies the concept of a Flow — a structured sequence that coordinates multiple agents through states and transitions. For the 20 Questions game, the flow alternates between the player and the answerer. It starts by generating a question, listens for an answer, checks whether the game should continue, and finally ends when either the player guesses correctly or runs out of turns. This orchestration is handled by a TwentyQuestionsFlow class with four key stages: ask\_question, answer\_question, game_should\_continue, and finish. CrewAI can even visualize this process as a flowchart, which helps to see how each turn loops until the game ends.
| |
Every turn works like this: the player agent asks a new question based on previous history; the answerer agent responds; then the system decides whether to proceed or stop. Each stage updates a shared game state that records the turn number, the question and answer, and whether the player has already guessed correctly.
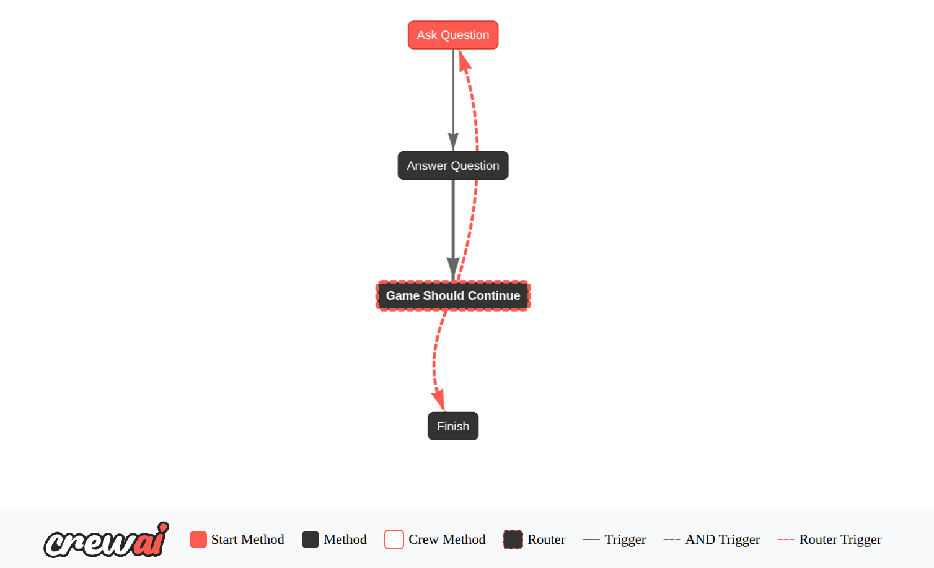 CrewAI Visualization for Agent for 20-questions
CrewAI Visualization for Agent for 20-questions
The player is a CrewAI Agent acting as a focused reasoner. Its goal is to minimize uncertainty — to identify the hidden entity in as few turns as possible. It uses a large prompt template that includes the full game history and guidance on strategy. The agent starts broad, asking high-level questions that help divide the possibility space in half, and then narrows down as more information accumulates. If it feels confident, it can ask directly, “Is it ?”.
This behavior is shaped by a carefully tuned instruction template, which provides rules like:
- start broad, then narrow;
- ask about properties before identity;
- use binary partitioning;
- pivot when the answer is “n/a” and so on.
These cues make the model behave like a smart, disciplined inquirer rather than a random guesser. CrewAI enforces structure here: the agent must output exactly one question, with no commentary or reasoning trace. That constraint keeps the interaction clean and realistic.
| |
The answerer is another CrewAI agent with a much simpler job: respond truthfully to yes/no questions about the secret entity. It’s given a structured schema to ensure consistent outputs — a short justification, a yes_or\_no field (“yes”, “no”, or “n/a”), and a correct flag to indicate if the player’s guess is right.
The prompt for the answerer is longer than it looks at first glance. It teaches the model how to handle tricky cases — for example, what to do with ambiguous entities or irrelevant questions. If the question is unanswerable or nonsensical (like “Does it have parents?” when the entity is a city), the answerer replies “n/a.” If the player’s question is a direct guess, the answerer marks correct=True if it matches closely enough. Everything else is handled through well-defined logic.
This strict response structure turns the answerer into a reliable game partner rather than a chatty model that improvises. The benefit is that the flow can depend on clean, parseable outputs — essential for automation.
| |
One interesting feature of CrewAI is its support for tools — small components that agents can call to access extra capabilities, as seen in the previous sample code. In this project, I used a simple “search” tool that mimics an online lookup. Instead of hitting an actual API, it uses another LLM to produce concise, factual summaries of what a web search might reveal. This mock search helps the player ground its reasoning without relying on real internet access. Later, it could easily be replaced with a true API such as Bing or Serper. Even though this part isn’t required for the game to function, it makes the agent’s questions feel more informed and consistent.
| |
Behind the scenes, the game maintains a shared state object that records everything: the answer, the category, the turn index, the complete list of question–answer pairs, and whether the player has already guessed correctly. The state also tracks how often the search tool has been called.
Each time the player asks or the answerer replies, this state is updated. It’s then passed back into the next round of the flow, giving both agents context and continuity. In practice, this means the player can build on what it already knows, and the answerer can remain consistent across turns.
| |
After every exchange, the flow checks whether the player’s guess was correct or whether twenty turns have passed. If either condition is met, the game ends. Otherwise, it loops back for another question. CrewAI’s router handles this branching elegantly: it routes control to “next_turn” if the game should continue or “game_over” if it’s done.
Once finished, a short summary is printed, and the session terminates. This logic might sound simple, but the clarity of CrewAI’s structure makes it easy to trace and modify. Adding features like scoring or replay support would be straightforward extensions.
Dataset Creation
The dataset provided in the Tinker example consisted of common English nouns, but I found that dataset a bit too easy—and frankly, not very interesting. I didn’t actually test how well it worked, but I wanted something that could better reflect real reasoning difficulty.
So instead, I created a custom dataset of 200 nouns with help from ChatGPT. During the process, I noticed that the agent’s success rate was highly dependent on the category of the object. For example, categories like animals and instruments were straightforward, while abstract concepts or geographical locations caused the model to struggle.
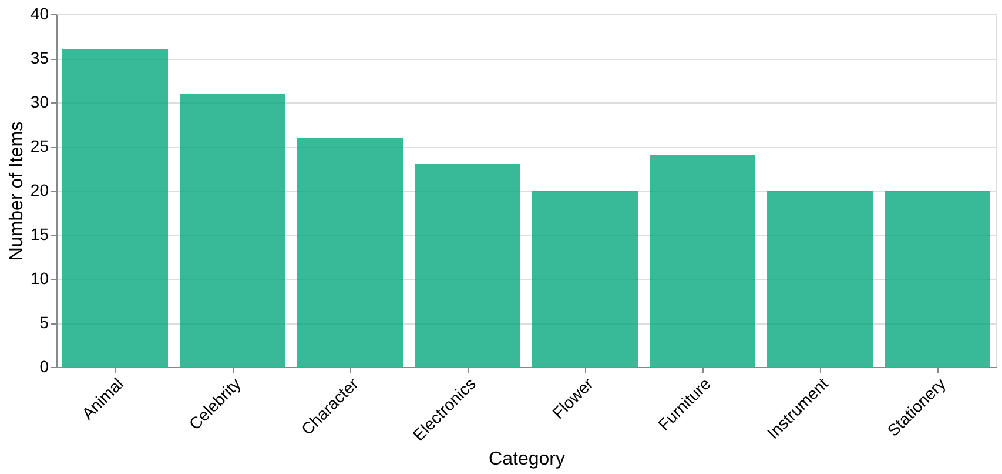
Dataset size by category
To ensure a balanced and meaningful challenge, I manually reviewed all entries, keeping simpler and more concrete categories while removing ambiguous or obscure ones. The final dataset contained only well-known and recognizable entities.
In the end, I had exactly 200 samples, which I split into 80% for training and 20% for testing. The split was done within each category, ensuring balanced category representation across both sets. The full dataset is available here.
Evaluating 20-questions Agent
After several iterations and careful manual prompt tuning, the complete 20-questions agent became considerably more complex than Tinker’s original example. For evaluation, I wrote a standalone testing script — entirely independent from both Agent-lightning and Tinker — which repeatedly invoked the `CrewAI` flow in a loop.
Here’s the evaluation logic:
| |
For testing, I compared four off-the-shelf models:
- Three from the Qwen3 Instruct 2507 family, all accessed via Tinker’s sampling client API.
- One from the GPT family (GPT-4.1) for comparison.
The answerer model was always GPT-5-mini (set to low reasoning effort). The search tool was mocked by GPT-4.1 — meaning weaker models could “use” GPT-4.1 as a “reasoning” tool if they figured out how (I told them it was a search engine, of course).
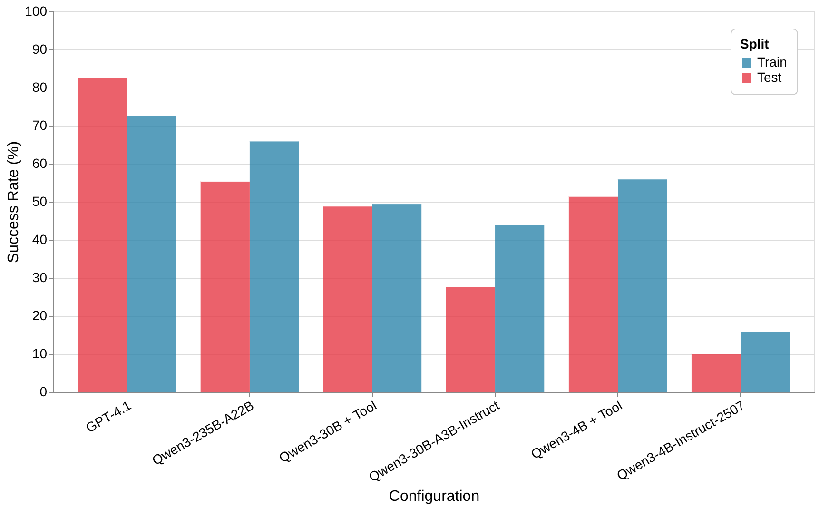
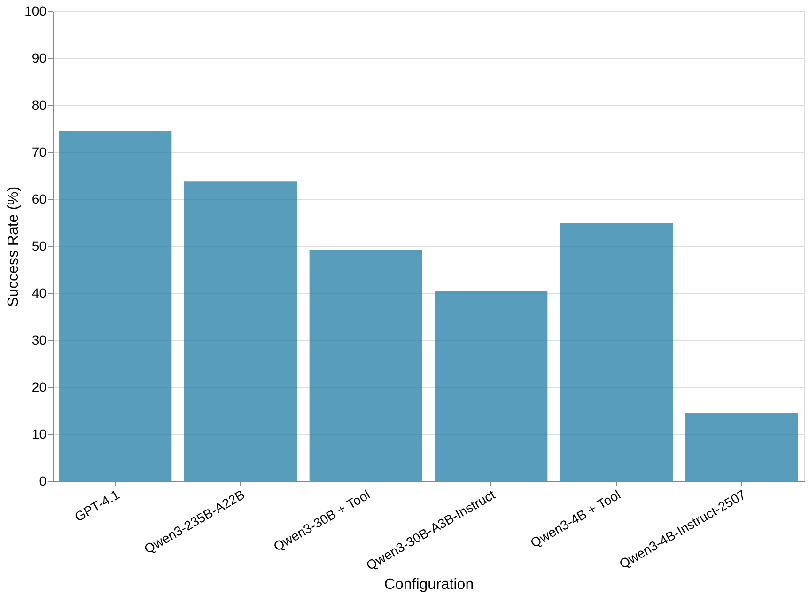 Off-the-shelf model performance on 20-Questions
Off-the-shelf model performance on 20-Questions
Out of seven configurations I tested, GPT-4.1 stood out with a top score of 74.5. Actually in earlier, harder tasks, GPT-4.1 already achieved around 50%, while others remained below 20%. Among the Qwen family, Qwen3-235B-A22B-Instruct-2507 performed comparably to GPT-4.1, whereas Qwen3-4B trailed behind at 14.5. However, when the 4B model used the external search tool, its performance jumped to 50%+ — a significant improvement. Interestingly, when GPT models were given the same tool, they almost never used it. This behavior likely reflects differences in tool-use pretraining across model families.
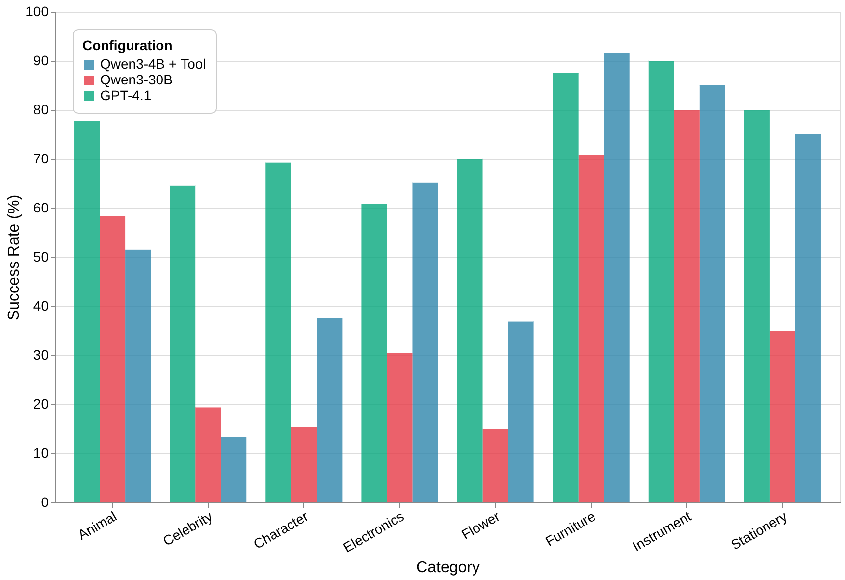
By category, animals, furniture, and instruments were relatively easy; celebrities, fictional characters, and flowers were much more challenging.
I also compared each model’s success rate across training and test subsets to observe whether my data split is even.
 Comparison between training dataset accuracy and test
Comparison between training dataset accuracy and test
Hyper-parameter Tuning
For fine-tuning, I initially reused the setup from my earlier “hello-world” trial — but it didn’t perform well. Early runs showed unstable training dynamics: losses fluctuated heavily, and convergence was inconsistent. Following Tinker’s official tuning guide, I began systematically adjusting hyper-parameters.
It was during this process that I discovered a key insight from their website: The learning rate required by LoRA fine-tuning is roughly 10× higher than that used for full fine-tuning. Unfortunately the learning is still not working even though I increased my learning rate. After several failed manual trials, I switched to a grid search strategy over the following parameters:
- Learning rate: 3e-5, 1e-4, 3e-4
- Group size: 8, 16
- Loss: ppo, importance sampling
- Seed: 0, 17, 42
- LoRA Rank: 8, 16, 32
- Batch size: 8, 16, 32
I ran 2–3 experiments in parallel, each using 20–30 rollout runners, limited mainly by the Azure OpenAI endpoint capacity used for the answerer model. Each experiment took 2–4 hours, and the full tuning campaign ran for over 24 hours. Although I limited the number of epochs to 1 per trial to control costs, the accumulated compute shown on Tinker’s dashboard was still significant.
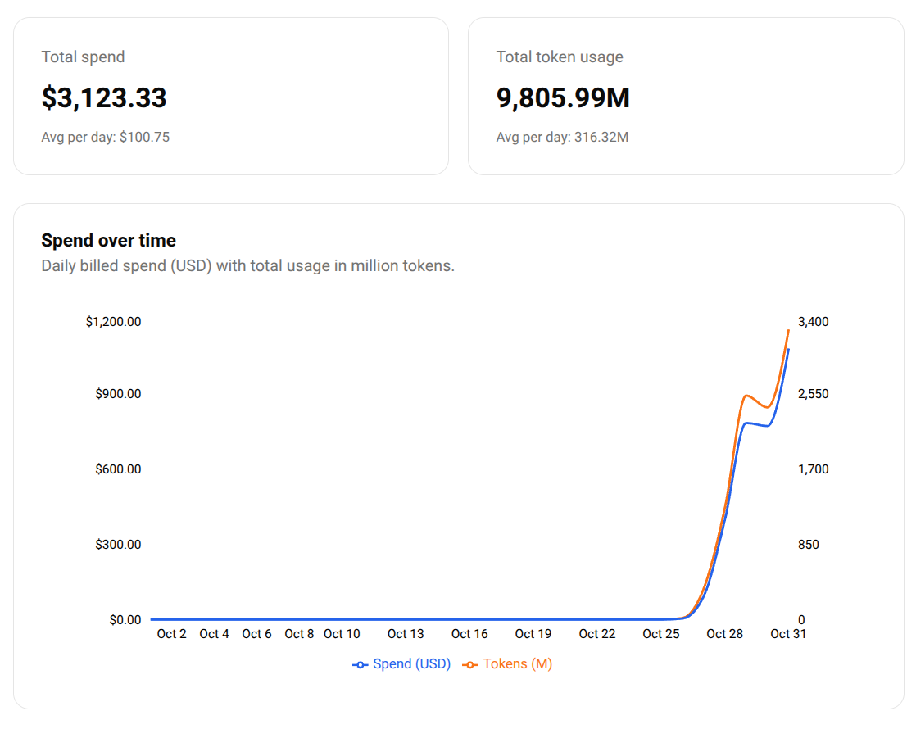 My spendings on Tinker
My spendings on Tinker
Since my trial period was still active, I didn’t have to pay for these runs — but in general, parameter tuning cost should be treated as part of the experimentation budget, especially when exploring new frameworks or algorithms.
Ultimately, I plotted the results as a parallel-coordinate diagram, which revealed several immediate patterns: (1) Top-performing runs clustered around group_size = 16 and batch_size = 16. (2) High-reward runs tended to use LoRA ranks around 16. (3) The random seed had a major effect on convergence — seed 17 consistently yielded smoother optimization.
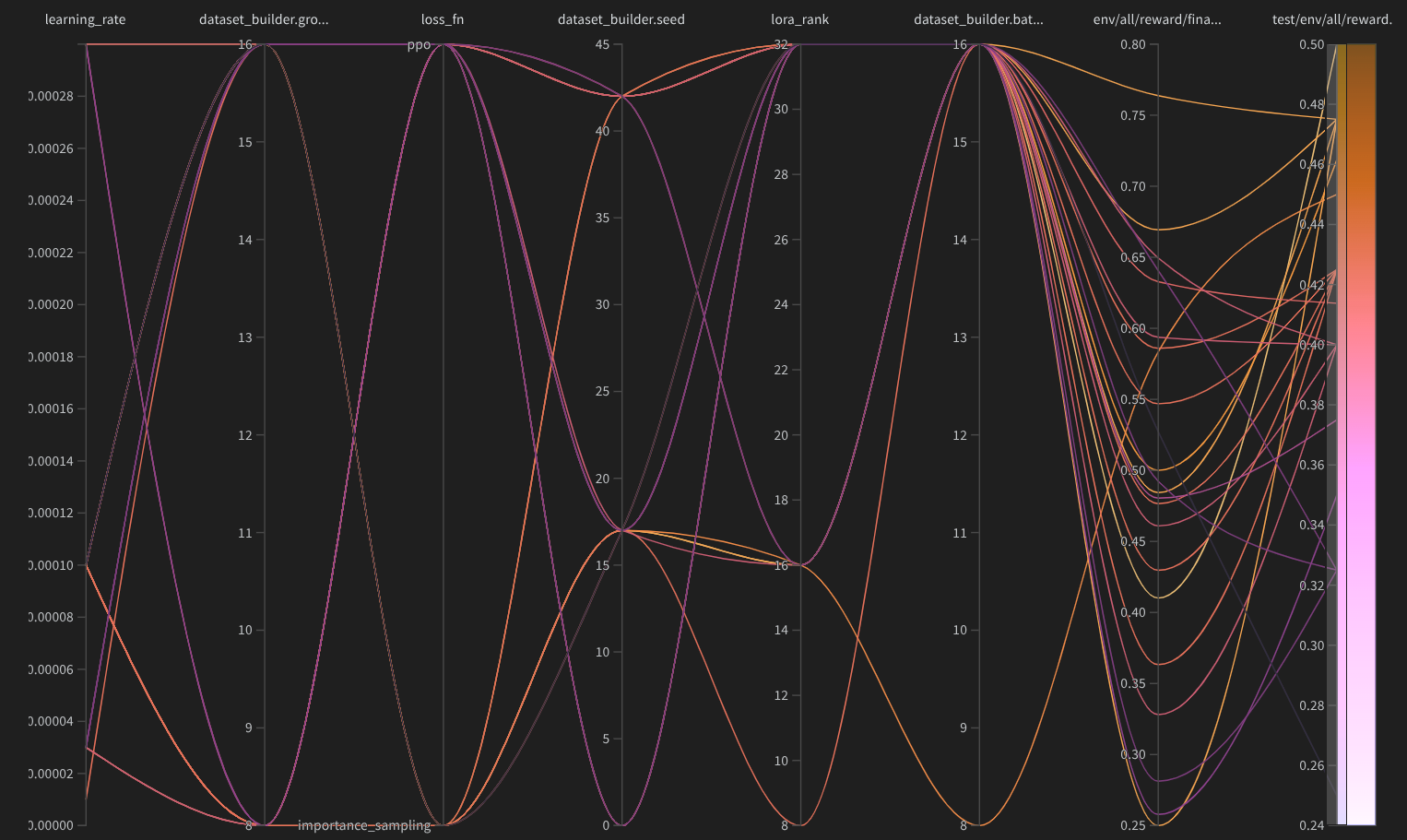 Parallel-coordinate diagram of the hyper-parameters
Parallel-coordinate diagram of the hyper-parameters
I settled on the following configuration for my final experiments, as my Tinker trial was nearing expiration: Learning rate: 1e-4; Batch size: 16; Group size: 16; Seed: 17; Number of epochs: 10; LoRA rank: 16; Loss function: Importance Sampling
Final Training Result
Now comes the most exciting part — the results. Let’s first look at how Qwen3-4B-Instruct-2507 and Qwen3-30B-A3B-Instruct-2507 perform as the player models after sufficiently long training, both without tool assistance.
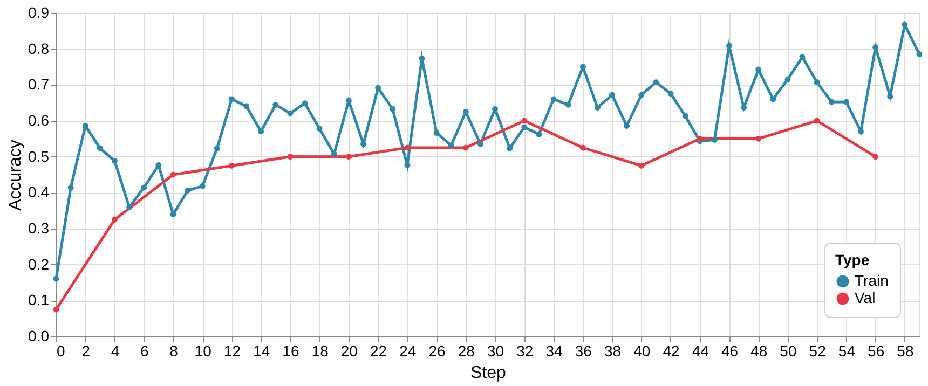
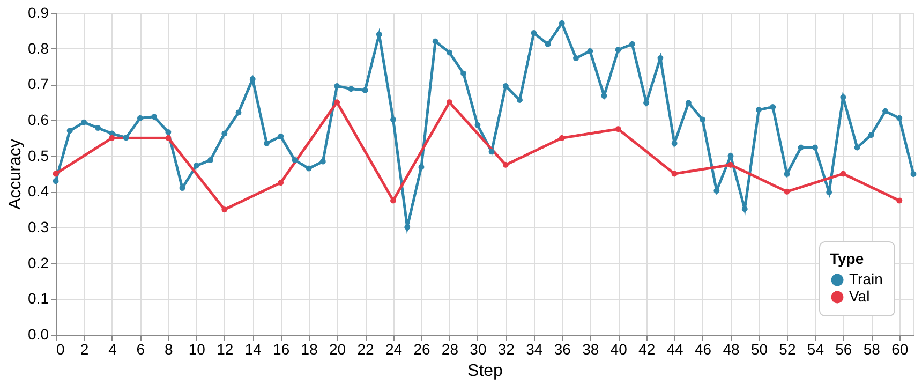
The first figure, corresponding to Qwen3-4B-Instruct-2507, shows a relatively smooth and stable training curve. Both training and validation accuracy improve steadily, with the training accuracy stabilizing around 0.7–0.8 and the validation accuracy around 0.5–0.6. The gap between them remains moderate, suggesting reasonable generalization.
In contrast, the second figure, showing Qwen3-30B-A3B-Instruct-2507, is much noisier. Accuracy fluctuates widely, occasionally peaking near 65%, but without settling into a stable trend. As training progresses, accuracy begins to decline — indicating not just overfitting, but potential instability in optimization itself.
I also experimented with Qwen3-4B augmented by a mocked search tool powered by GPT-4.1. However, this setup was prohibitively expensive in time: each training step took nearly two hours, compared to just a few minutes without tools. The slowdown came from significantly longer prompts, extended generations, and increased conversational turns. Unfortunately, the training curve for this setup performed poorly — it actually degraded over time. Given my time constraints, I didn’t pursue additional tuning for this configuration.
 Training curve of Qwen3–4B-Instruct-2507 with search tool.
Training curve of Qwen3–4B-Instruct-2507 with search tool.
Case Studies and Behavioral Patterns
Examining Qwen3-4B’s behavior over different training stages provided some insight.
In the early stages, its responses were short and literal, with minimal reasoning.
...
## What you have: Game history (Q/A pairs):
Question #1: Is it a mammal?
Response #1: no
Question #2: Is it a cold-blooded animal?
Response #2: yes
Question #3: Can it lay eggs?
Response #3: yes
Question #4: Does it have four legs?
Response #4: no
Question #5: Does it live in water?
Response #5: no
Question #6: Does it have fins?
Response #6: no
Question #7: Does it have wings?
Response #7: no
Question #8: Does it have a backbone?
Response #8: no
Question #9: Does it have a head?
Response #9: no
Question #10: Does it have a body made of cells?
Response #10: yes
## Strategy guidelines (concise, practical)
...
Now produce your single best next question.<|im_end|>
<|im_start|>assistant
Does it have a gut?<|im_end|>
During mid-training, it started including more reasoning phrases — internal justifications before making guesses.
...
## What you have: Game history (Q/A pairs):
Question #1: Is it a superhero?
Response #1: no
Question #2: Is it from a book?
Response #2: no
Question #3: Is it a real person?
Response #3: no
Question #4: Is it an animal?
Response #4: yes
Question #5: Is it a domestic animal?
Response #5: no
## Strategy guidelines (concise, practical)
...
Now produce your single best next question.<|im_end|>
<|im_start|>assistant
Thought: The entity is an animal (from Q4), not domestic (Q5), not a superhero or from a book or real person. So it’s a wild animal. Possible candidates: lion, tiger, wolf, bear, etc. Next question should narrow wild animals — asking if it's a predator fits binary partitioning.
Final Answer: Is it a predator?<|im_end|>
By the late stages, its replies became verbose and speculative, often filled with multiple guesses, hinting that the model might have begun memorizing elements of the training data.
...
## What you have: Game history (Q/A pairs):
Question #1: Is it a rose?
Response #1: no
Question #2: Is it a daisy?
Response #2: no
Question #3: Is it a sunflower?
Response #3: no
Question #4: Is it a lily?
Response #4: no
Question #5: Is it a tulip?
Response #5: no
Question #6: Is it an iris?
Response #6: no
Question #7: Is it a carnation?
Response #7: no
Question #8: Is it a peony?
Response #8: no
Question #9: Is it an orchid?
Response #9: no
Question #10: Is it a hyacinth?
Response #10: no
## Strategy guidelines (concise, practical)
...
Now produce your single best next question.<|im_end|>
<|im_start|>assistant
Thought: So far, eliminated are common roses, daisies, sunflowers, lilies, tulips, irises, carnations, peonies, orchids, hyacinths. Remaining common flowers include: lotus, chamomile, marigold, poppy, dahlia, hibiscus, aster, cosmos, iris (already out), iris-related (no). Poppy is common, not ruled out. Dahlia is common. Hibiscus is common. Aster, cosmos, chamomile. "Poppy" is a straightforward, familiar flower. "Dahlia" is also common. Among these, "dahlia" is less commonly known than "poppy" but still familiar. "Hibiscus" is common in tropics and often called a flower. But "poppy" is a strong candidate — it's well known, satisfies "common and familiar", and not ruled out. No "poppy" in previous list. So it's a plausible guess.
Final Answer: Is it a poppy?<|im_end|>
Interestingly, this reflective “thinking pattern” appeared only in the smaller model. This also explains why Qwen3-4B trained much more slowly than its larger counterpart: on average, its response length during training was roughly 20× longer.
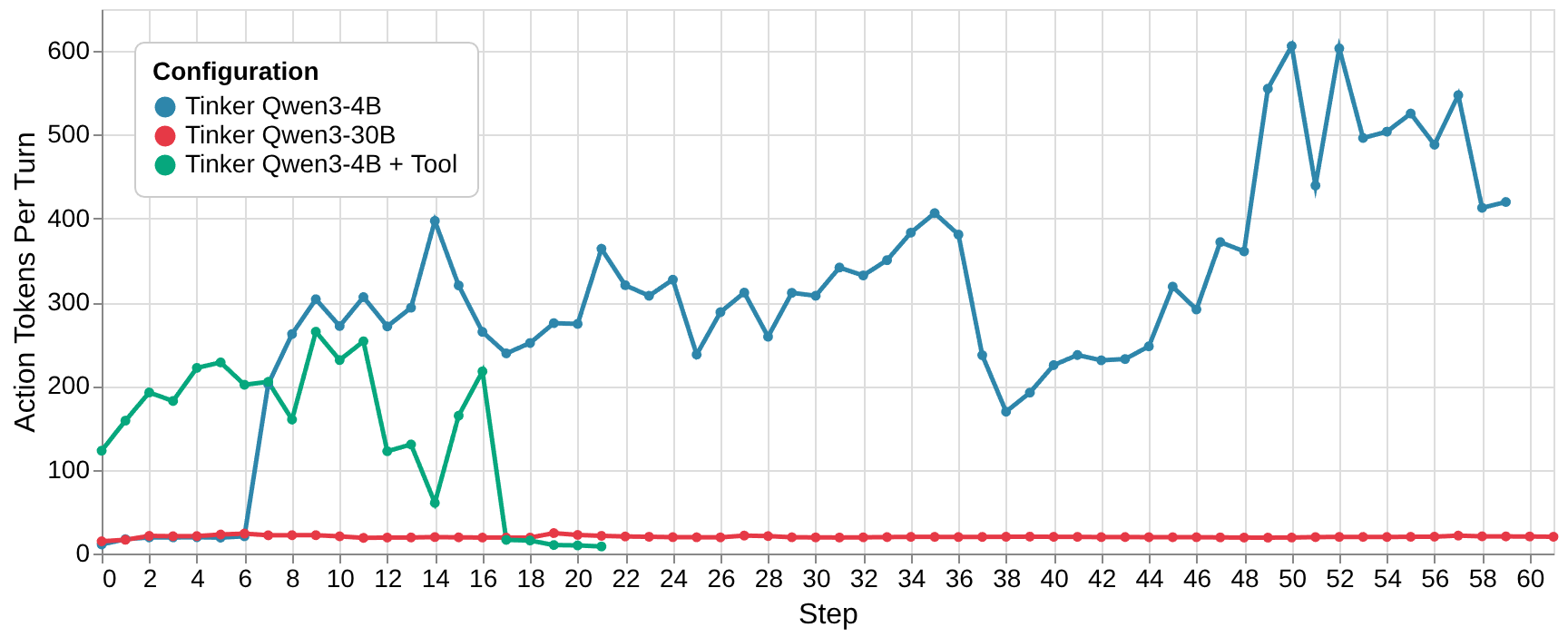 Number of generated action tokens
Number of generated action tokens
The Qwen3-30B model, on the other hand, almost never exhibited such internal reasoning behavior. Even in late training, it consistently produced short, repetitive sequences like:
Thought: I now can give a great answer.
Final Answer: Is it John Lennon?
The “I now can give a great answer.” has appeared in almost all actions when Qwen3–30B training hits the later stages. I suspect that’s why the training of that model fails to improve.
I didn’t have enough time to perform similar qualitative studies on the test set, but I expect those examples would have revealed even clearer distinctions between the models.
Comparing with VERL
Earlier, I mentioned that Tinker support in Agent-lightning was designed as a drop-in replacement for VERL. To validate this, I swapped out Tinker and re-ran the same experiments using VERL. This can be simply done because Agent-lightning has an out-of-the-box support of VERL.
| |
These runs used VERL v0.5.0, as v0.6.0 (which introduced LoRA support) wasn’t yet merged at that moment. Because of that, I couldn’t leverage parameter-efficient fine-tuning. I also encountered GPU out-of-memory errors when serving Qwen3-4B-Instruct-2507 via vLLM on an A100 80 GB GPU, for reasons still unclear. As a workaround, I switched to Qwen2.5-3B-Instruct, which made the comparison slightly unfair but workable.
Initial trials with a learning rate of 1e-6, group size = 16, and batch size = 16 were unstable and slow, so I reduced group size to 8 and learning rate to 5e-7.
 Training Curve of Qwen2.5–3B-Instruct, with VERL
Training Curve of Qwen2.5–3B-Instruct, with VERL
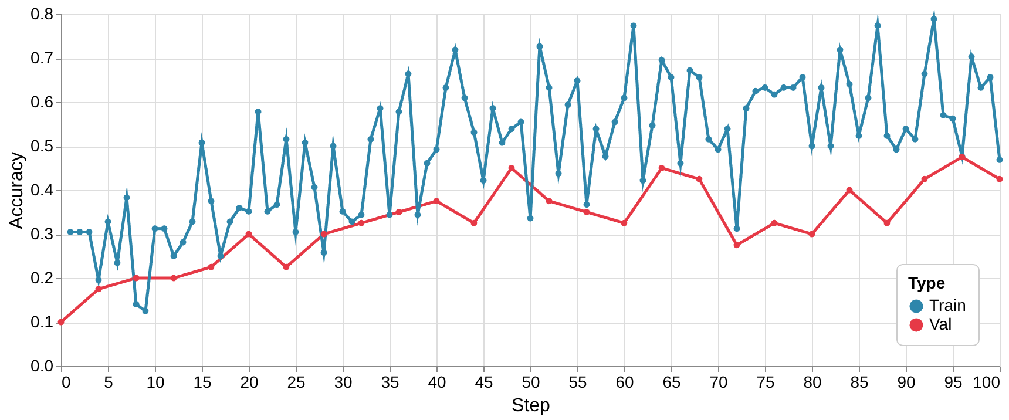
The results are telling. Both Qwen2.5-3B-Instruct (VERL) and Qwen3-4B-Instruct-2507 (Tinker) began at roughly 10% accuracy. However, the VERL-based model improved much more slowly, taking about 40 steps to reach 40% validation accuracy, and even after a late boost, it still underperformed compared to Qwen3-4B, which stabilized between 50%–60%.
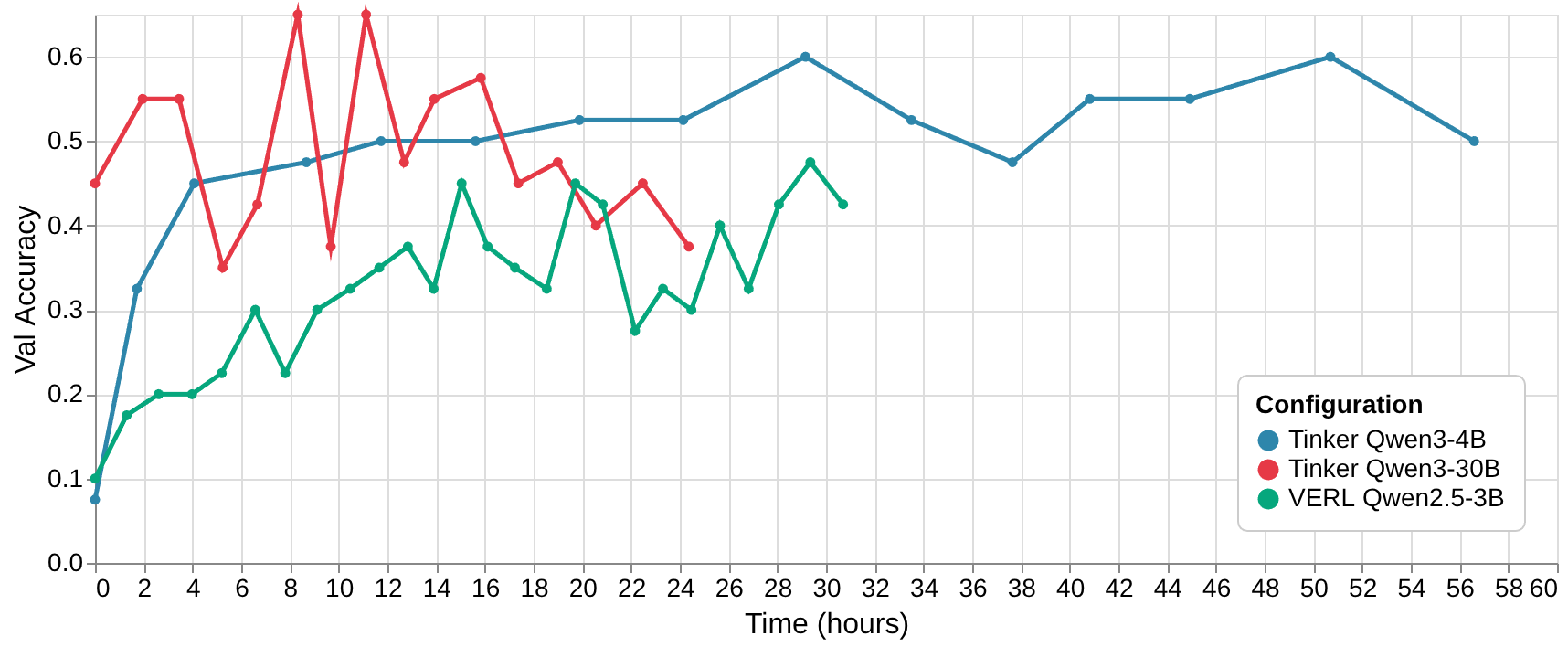 Absolute time versus validation accuracy
Absolute time versus validation accuracy
When comparing absolute time rather than training steps, VERL initially appears faster — completing 100 steps in about one day, whereas Tinker took roughly two days for 60 steps. Yet Tinker’s rate of convergence was significantly better. Another observation is that the Qwen3-30B model finishes much earlier — consistent with its shorter response lengths seen during training.
Efficiency and Cost Analysis
Profiling the runs showed that around 40% of VERL’s total runtime was spent on weight updates, while rollout sampling consumed relatively little time. Tinker displayed the opposite pattern: training itself took less than 5% of the time, with the vast majority devoted to sampling. This discrepancy likely stems from LoRA fine-tuning, which drastically reduces the computational cost of backpropagation.
In terms of financial cost, VERL was clearly more economical. Excluding the Azure OpenAI inference cost for the answerer model, the total cost for VERL came to roughly $110, compared to $250 for Tinker. Curiously, the 30B and 4B Tinker runs had nearly identical costs — explained by the fact that the smaller model produced much longer responses, offsetting its computational advantage.
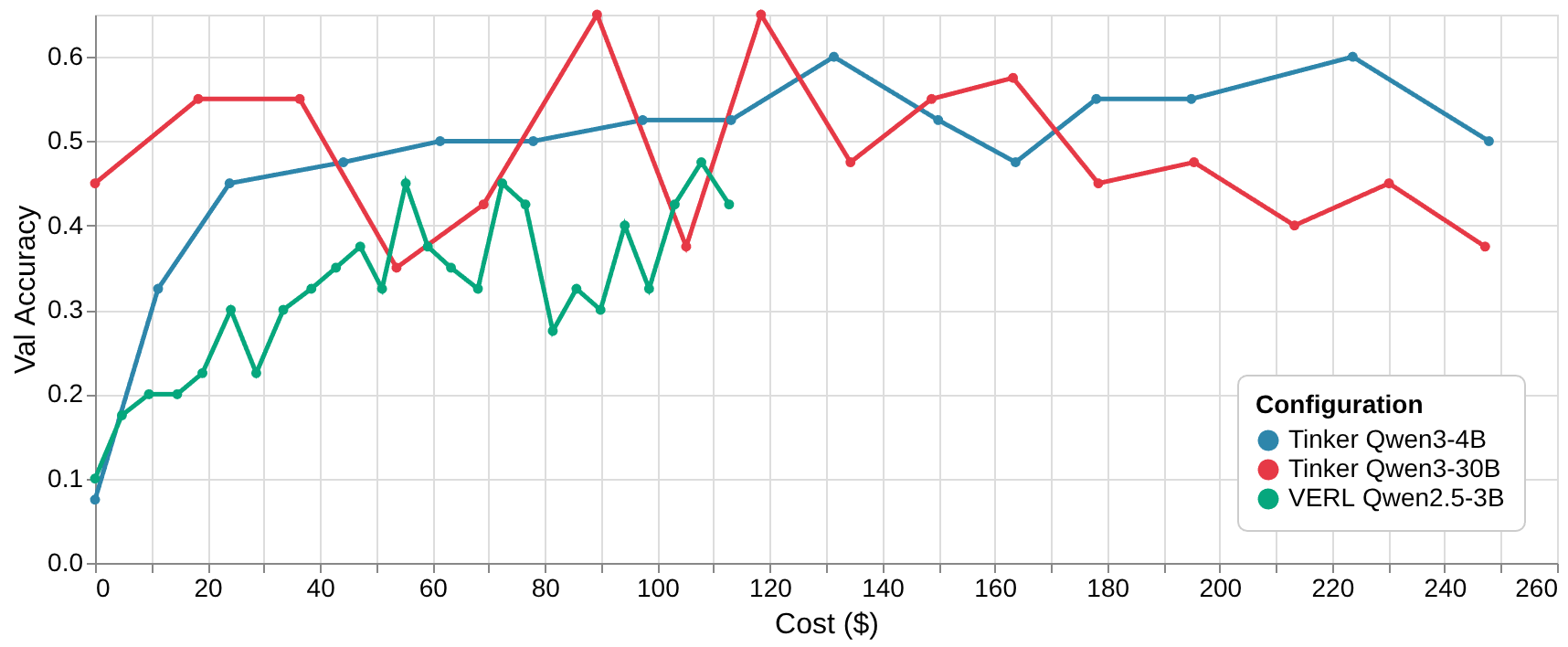 Cost in Dollar versus Validation Accuracy
Cost in Dollar versus Validation Accuracy
These comparisons are, of course, informal rather than rigorous. A fair evaluation would need to account for differences in hyper-parameter tuning, environment setup, and multi-GPU scaling. Still, several trends are clear: Tinker offers a faster convergence, cleaner training interface, and lower engineering overhead than VERL. Its pricing, despite slightly higher, is still very competitive compared with self-hosting GPUs, and it completely abstracts away the painful setup of distributed systems like FSDP, Megatron, and vLLM — all of which can be a genuine nightmare to manage.
For researchers or engineers exploring custom fine-tuning loops, RLHF, or algorithmic innovation, Tinker provides an efficient, production-ready environment that lets you focus on the ideas, rather than putting effort into the infrastructure.
For full code of the concepts and examples illustrated in this blog can be found here.